Trong thời đại ngày nay khi mà kỹ thuật ô tô liên tục phát triển, các hãng xe luôn tìm kiếm những cách mới để đi nhanh hơn và tránh lãng phí ở mỗi góc cua với độ chi li tính bằng phần triệu giây đồng hồ. Bên cạnh đó còn có những công nghệ tưởng chừng đã cũ nhưng được tiếp cận theo hướng mới và trở nên đáng chú ý hơn, tiêu biểu nhất là Torque Vectoring.
Torque Vectoring là gì?
Khi xe vận hành trên đường thẳng, để đạt được hiệu năng vận hành tốt là một điều khá đơn giản: thêm sức mạnh, độ bám đường và tốc độ là bạn sẽ dễ dàng đạt được hiệu năng cao. Nhưng khi con đường bắt đầu ngoằn ngoèo, mọi thứ trở nên rắc rối hơn một chút, đồng thời cũng thú vị hơn.
Trên một đường thẳng, các bánh xe ở hai bên của ô tô quay với cùng tốc độ. Nhưng khi rẽ, bên trái và bên phải của xe tạo thành hai vòng tròn song song với bán kính khác nhau. Vì các bánh xe bên ngoài chuyển động trên bán kính lớn hơn nên chúng phải đi được quãng đường lớn hơn trong cùng khoảng thời gian khi bánh xe bên trong đi được quãng đường ngắn hơn.
Để giải quyết vấn đề này, ô tô đã được trang bị bộ vi sai – thiết bị cơ khí cho phép các bánh xe ở cùng một trục có thể quay với tốc độ độc lập, không phụ thuộc vào nhau. Vi sai không chỉ có một loại mà được phát triển theo nhiều kiểu rất phong phú đa dạng, một trong số đó tạo thành cơ sở cho công nghệ Torque Vectoring.
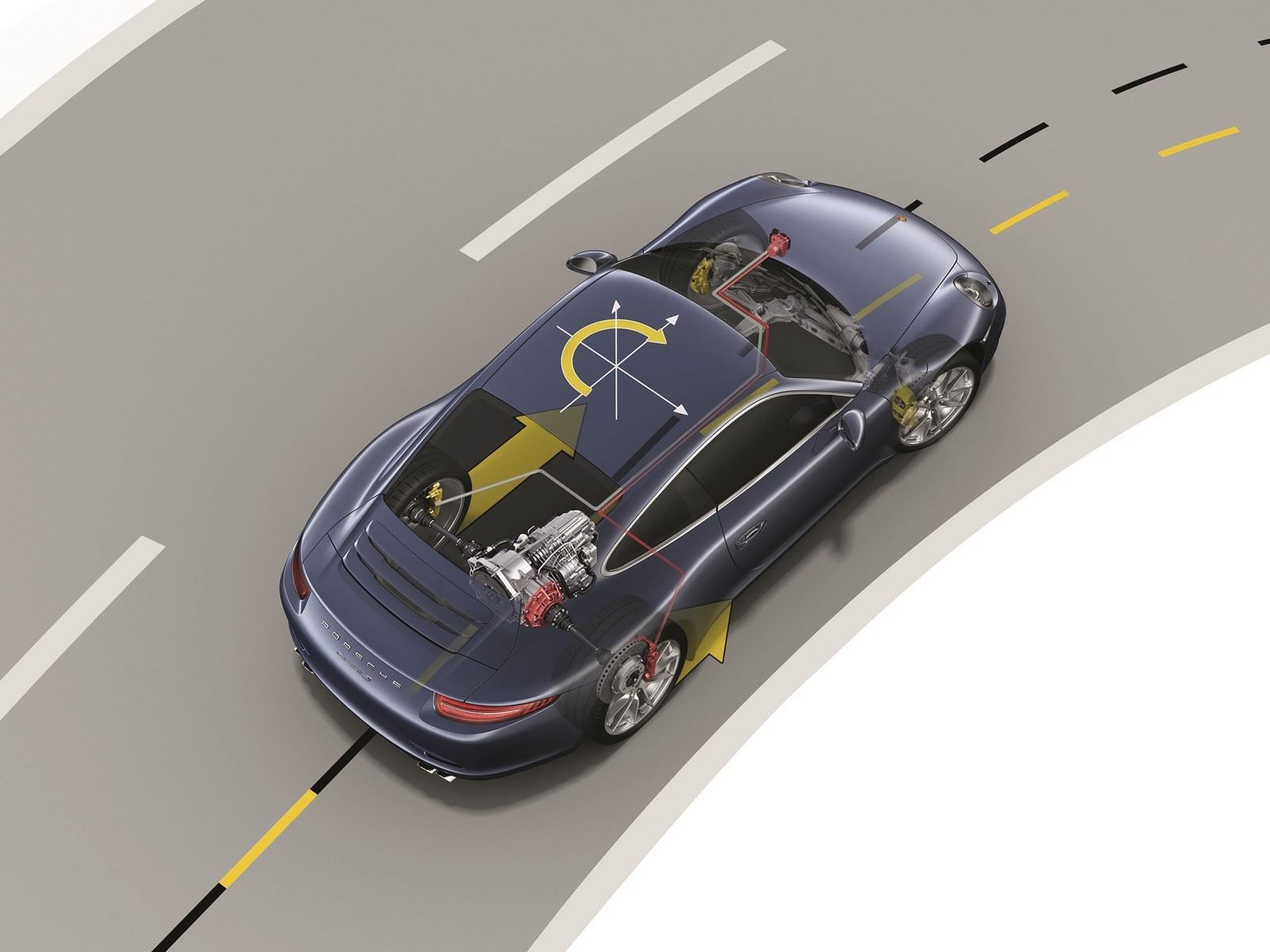
Nói một cách đơn giản, Torque Vectoring mang lại cho xe khả năng thay đổi sức kéo (mô-men xoắn) tác động lên từng bánh xe. Khi làm như vậy, độ chính xác của thao tác đánh lái khi vào cua sẽ được cải thiện đáng kể. Các đặc tính xử lý của xe cũng có thể được thay đổi để chủ động gây ra hiện tượng thiếu lái và thừa lái, hoặc giảm thiểu hoàn toàn nhằm mục đích tạo ra những cảm giác lái khác nhau như ổn định, an toàn hoặc phấn khích theo kiểu… dễ drift xe.

Lịch sử của Torque Vectoring
Năm 1996, Honda và Mitsubishi cho ra đời những mẫu xe thể thao có hệ thống Torque Vectoring. Ý tưởng của công nghệ này được xây dựng dựa trên các nguyên tắc cơ bản của vi sai tiêu chuẩn. Bộ vi sai Torque Vectoring thực hiện các nhiệm vụ cơ bản của vi sai đồng thời truyền sức kéo độc lập giữa các bánh xe. Khả năng truyền mô-men xoắn này giúp cải thiện khả năng xử lý và lực kéo trong hầu hết mọi tình huống. Bộ vi sai Torque Vectoring ban đầu được sử dụng trong đua xe, với những chiếc xe đua rally của Mitsubishi là một trong những loại xe đầu tiên sử dụng công nghệ này.
Mẫu xe đỉnh cao năm 1996 của Honda là chiếc Prelude thế hệ thứ năm được trang bị bộ vi sai Torque Vectoring chủ động mang tên Active Torque Transfer System (ATTS) tại cầu trước. Sau đó, chính loại công nghệ này được quảng bá với những tên gọi khác nhau ở nhiều thị trường, bao gồm Type S (Nhật Bản), VTi-S (Châu Âu) và Type SH (Bắc Mỹ). Về bản chất, ATTS là một hộp số tự động nhỏ được kết nối với bộ vi sai, trong đó bộ điều khiển điện tử kích hoạt bộ ly hợp để thay đổi đầu ra mô-men xoắn giữa mỗi bánh dẫn động.

Do bản chất là xe dẫn động cầu trước với động cơ đặt trước nên Prelude có xu hướng bị thiếu lái một cách tự nhiên, ATTS giúp ích rất nhiều trong việc hạn chế nhược điểm này, khiến xe vận hành an toàn hơn. Từ nền tảng đó, Honda tiếp tục phát triển hệ thống này thành một phần quan trọng của hệ dẫn động Super Handling all-wheel-drive (SH-AWD) vào năm 2004, giúp cải thiện khả năng xử lý bằng cách tăng sức kéo truyền đến các bánh xe bên ngoài góc cua.
Cùng lúc đó, Mitsubishi Lancer Evolution IV GSR được trang bị hệ thống Active Yaw Control (AYC) tương tự vào năm 1996. AYC được lắp vào bánh sau và hoạt động để chống lại tình trạng thiếu lái thông qua một loạt bộ ly hợp điều khiển điện tử giúp kiểm soát đầu ra mô-men xoắn. Hiện nay, các mẫu xe giá rẻ của Mitsubishi như Xpander hay Xforce cũng được trang bị AYC, nhưng là một phiên bản “rút gọn” đơn giản hơn để phù hợp với phân khúc bình dân của chúng.

Cụm từ “Torque Vectoring” được công ty Ricardo sử dụng lần đầu tiên vào năm 2006, trong đăng ký SAE 2006-01-0818 có liên quan đến các công nghệ điều hướng của hãng này. Kể từ đó, nó mới trở thành thuật ngữ được sử dụng rộng rãi trong ngành xe. Có nhiều cách để quản lý và thực hiện cơ chế Torque Vectoring, với 4 phương thức nổi bật nhất, mỗi loại có ưu và nhược điểm riêng cũng như mức độ hiệu quả khác nhau.
Torque Vectoring bằng vi sai
Đây là dạng sơ khai nhất, xuất hiện sớm nhất của Torque Vectoring và là phương pháp được ưa chuộng nhất trên các mẫu xe thể thao hiệu năng cao khi nhà sản xuất không bị ràng buộc về chi phí thực hiện. Cách thức ứng dụng là trang bị cho xe bộ vi sai hạn chế trượt. Loại vi sai này có tác dụng nhận biết khi nào một bánh xe có dấu hiệu mất độ bám và sẽ truyền thêm sức kéo đến bánh còn lại trên cùng một trục, đó thường là bánh ở phía ngoài góc cua. Nhờ vậy, độ bám đường được đảm bảo, hiệu ứng thiếu lái và hiện tượng “torque steer” (bánh trước có thể bị kéo sang một bên trong quá trình tăng tốc) được giảm thiểu, nhất là đối với xe dẫn động cầu trước.

Trong những năm gần đây, vi sai hạn chế trượt được ứng dụng phổ biến hơn. Đối với các loại xe dẫn động cầu sau và dẫn động 4 bánh AWD, loại vi sai này đã được phát triển thêm khả năng thu nhận dữ liệu về tốc độ bánh xe, độ lệch và góc nghiêng. Từ đó, máy tính xử lý để xác định nên phân bổ sức kéo như thế nào đến từng bánh xe riêng lẻ. Bằng cách tăng tốc cho các bánh xe bên ngoài góc cua, xe sẽ đem lại khả năng đánh lái trong cua chính xác hơn và ít bị thiếu lái hơn. Có thể tìm thấy các loại vi sai kiểu này trong những mẫu xe RS của Audi hoặc xe trang bị Active M Differential của BMW.
Torque Vectoring bằng phanh
Biến thể này của công nghệ Torque Vectoring đang xuất hiện nhiều hơn trong thời gian qua, đặc biệt là đối với những chiếc xe hiệu năng cao với hệ dẫn động cầu trước, vì các bánh xe chủ động của chúng vừa phải nhận mô-men xoắn lớn, vừa phải dẫn hướng. Vi sai hạn chế trượt không đạt hiệu quả tốt nhất trong trường hợp này.

Những mẫu xe như Mercedes-AMG CLA 45 hay Volkswagen Golf GTI được trang bị hệ thống Torque Vectoring bằng phanh, sẽ áp dụng thêm lực phanh vào bánh xe ở phía trong góc cua khi xe đang ôm cua. Việc làm giảm tốc độ quay như thế này cũng có hiệu quả tương tự như dùng vi sai để làm tăng tốc độ quay của bánh xe ở phía ngoài góc cua, giúp cho cảm giác đánh lái chính xác hơn rõ rệt.
Tuy nhiên, Torque Vectoring bằng phanh có một số nhược điểm. Đầu tiên, nguyên lý của nó khá kỳ dị khi hứa hẹn cải thiện khả năng tăng tốc bằng cách dùng phanh, những điều tưởng chừng trái ngược nhau hoàn toàn. Dù vậy, ít nhất thì nó cũng chứng minh hiệu quả và cho thấy là một phương thức có chi phí hợp lý để giúp phổ biến công nghệ Torque Vectoring đến các mẫu xe phổ thông.

Nhược điểm thứ hai mới là nghiêm trọng: việc hệ thống tự áp dụng phanh quá nhiều sẽ dễ dẫn đến những hư hỏng, thậm chí có thể xảy ra ngay trong lúc đang vận hành ở tốc độ cao. Phanh sẽ nóng lên rất nhanh và có thể mất tác dụng đúng thời điểm người lái đang “say sưa” thưởng thức chiếc xe của mình, tiềm ẩn nguy cơ tai nạn.
Do đó, có thể thấy rằng Torque Vectoring bằng phanh là một giải pháp mang tính ngắn hạn, không thể đáp ứng được nhu cầu của những người muốn phát huy 100% tiềm năng xe với sự ổn định và đáng tin cậy.
Torque Vectoring bằng ly hợp trên vi sai
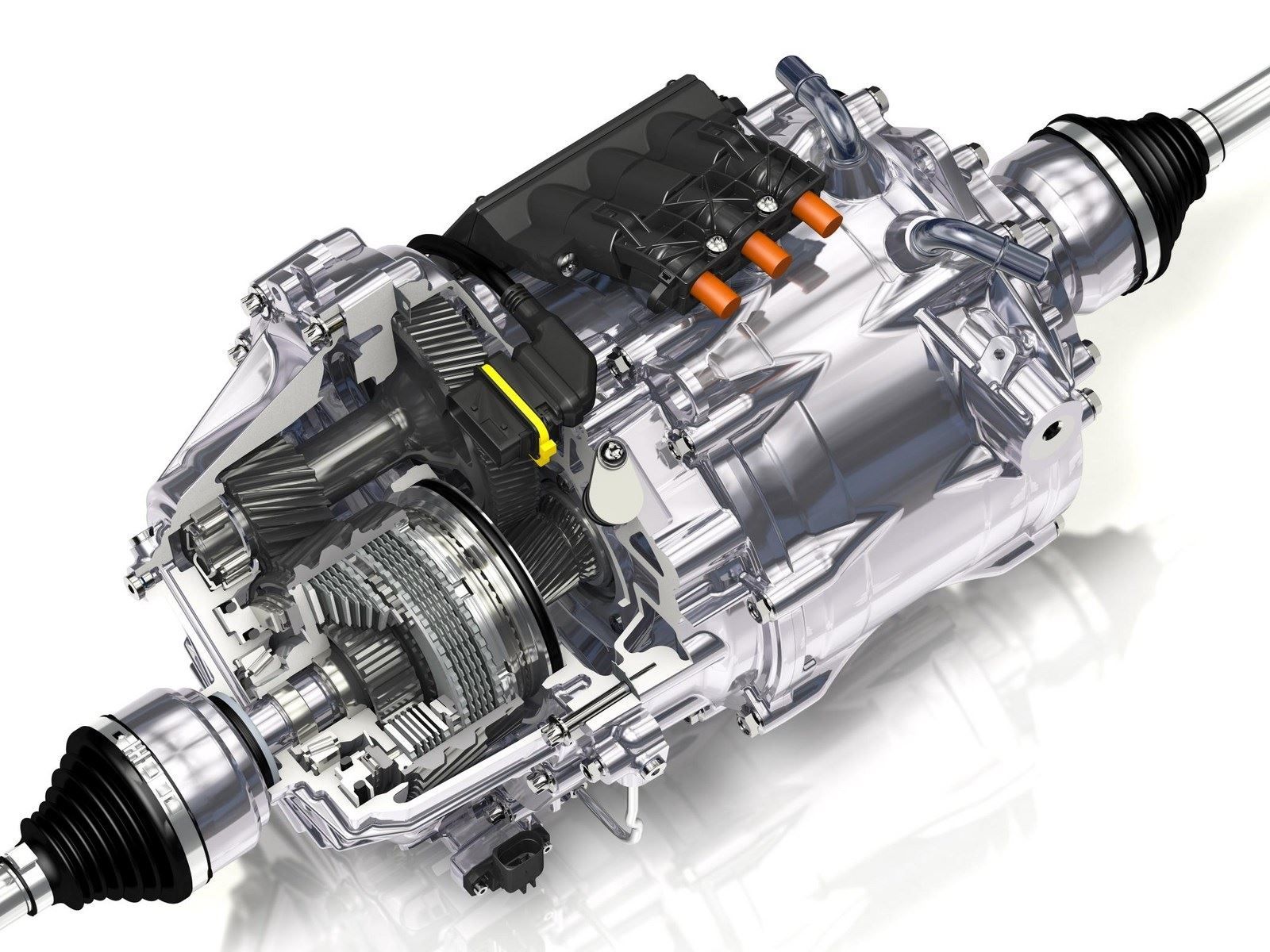
Các hệ thống Torque Vectoring bằng vi sai truyền thống và dựa trên cơ chế phanh đã tồn tại được một thời gian, nhưng phải đến gần đây, biến thể Torque Vectoring vi sai dựa trên ly hợp mới xuất hiện. GKN Drivelines là công ty tiên phong tạo nên các hệ thống kiểu này, cung cấp các thiết lập dẫn động bốn bánh được sử dụng trong các xe như Ford Focus RS hay Buick Regal GS. Chúng có bộ vi sai cầu sau độc đáo được tích hợp bộ ly hợp ở hai bên của trục dẫn động, có thể gài và ngắt các bánh sau riêng lẻ để điều chỉnh lượng sức kéo truyền đến từng bánh riêng lẻ.

Không giống như các hệ thống dựa trên vi sai truyền thống, hệ thống Torque Vectoring mới hơn này kiểm soát mô-men xoắn độc lập rất hiệu quả, cải thiện khả năng xử lý. Tất nhiên, còn có những lợi ích khác, chẳng hạn như chế độ “Drift Mode” của Focus RS. Chế độ này sử dụng bộ vi sai có ly hợp để phân bổ 70% mô-men xoắn cho bánh sau bên ngoài góc cua theo tỷ lệ phân chia cố định, khiến bánh xe đó quay nhanh hơn bánh phía bên trong rất nhiều, vượt xa khả năng của Torque Vectoring truyền thống trong việc cố ý tạo ra hiện tượng thừa lái quá mức.

Về lý thuyết, hệ thống này mở ra cho các hãng xe thêm nhiều phương thức tùy biến cơ cấu hoạt động của công nghệ Torque Vectoring, sao cho mỗi chiếc xe có khả năng vận hành đúng với tầm định vị phân khúc của chúng. Tính linh hoạt của các hệ thống như vậy khiến chúng rất ấn tượng khi được sử dụng trong các mẫu xe thể thao hiệu năng cao.
Torque Vectoring bằng điện
Giờ đây, chúng ta có phiên bản Torque Vectoring dành cho thời đại mới, chắc chắn sẽ ngày càng phổ biến hơn khi thế giới xe hướng tới một tương lai hoàn toàn thuần điện. Ở trạng thái hoạt động đơn giản nhất, Torque Vectoring bằng điện xảy ra khi hai động cơ điện được đặt trên cùng một trục dẫn động, tức là mỗi bánh xe ở trục đó đều được gắn mô-tơ điện của riêng nó, cho phép chúng được dẫn động theo cách độc lập. Điều này mang lại khả năng kiểm soát Torque Vectoring thực thụ vì mỗi bánh xe được điều khiển, dẫn động và điều chỉnh riêng lẻ, mỗi bánh xe có thể nhận được tối đa 100% mô-men xoắn hiện có.
Hơn thế nữa, bằng cách đảo ngược cực tính của động cơ điện, “mô-men xoắn âm” có thể được áp dụng, không chỉ làm chậm bánh xe mà còn quay nó theo hướng ngược lại so với bánh xe ở phía đối diện. Đây là thực tế đã xảy ra đối với mẫu siêu xe Acura NSX. Nó vừa cải thiện khả năng xử lý ở tốc độ cao, vừa giúp người lái thực hiện các thao tác xoay sở trong cự ly hẹp và tốc độ thấp dễ dàng hơn.

Về lý thuyết, nó có thể được sử dụng để thực hiện việc xoay thân xe tại chỗ. Tuy nhiên, các hệ thống này đòi hỏi sự phức tạp của việc bổ sung thêm một động cơ điện, khối lượng đi kèm và một số nhược điểm tiềm ẩn khi phân phối điện và bề mặt có độ bám thấp. Nếu không có chức năng khóa, việc truyền động điện bằng một bánh xe trên bề mặt trơn trượt sẽ trở nên khó khăn.

Ngoài ra còn có hạn chế là một bánh xe riêng lẻ chỉ có thể sử dụng sức kéo cực đại của một mô-tơ điện được gán cho nó, thay vì tổng mô-men xoắn kết hợp. Hãng GKN đã tạo ra một hệ thống kết hợp các nguyên tắc Torque Vectoring bằng điện với hệ thống dựa trên ly hợp, cho phép sử dụng một động cơ đơn, lớn hơn với công suất cao hơn, để dẫn động các bánh xe thông qua hệ thống ly hợp đôi. Mô-men xoắn có thể được phân bổ sang trái hoặc phải, với một trong hai bánh xe có thể nhận tới 100% tổng công suất mô-men xoắn của toàn bộ hệ thống.
Tổng hợp